Burger Flipper UR5
Robot Dynamics | MS Robotics Engineering | Worcester Polytechnic Institute
This was one of my Masters projects in robot kinematics and dynamics. The MatLab simulates a UR5 arm robot pickup and placing a burger onto a stove top (red). All joints are controlled via predetermined way-points in the path planning with the trapveltraj MatLab velocity profile function.
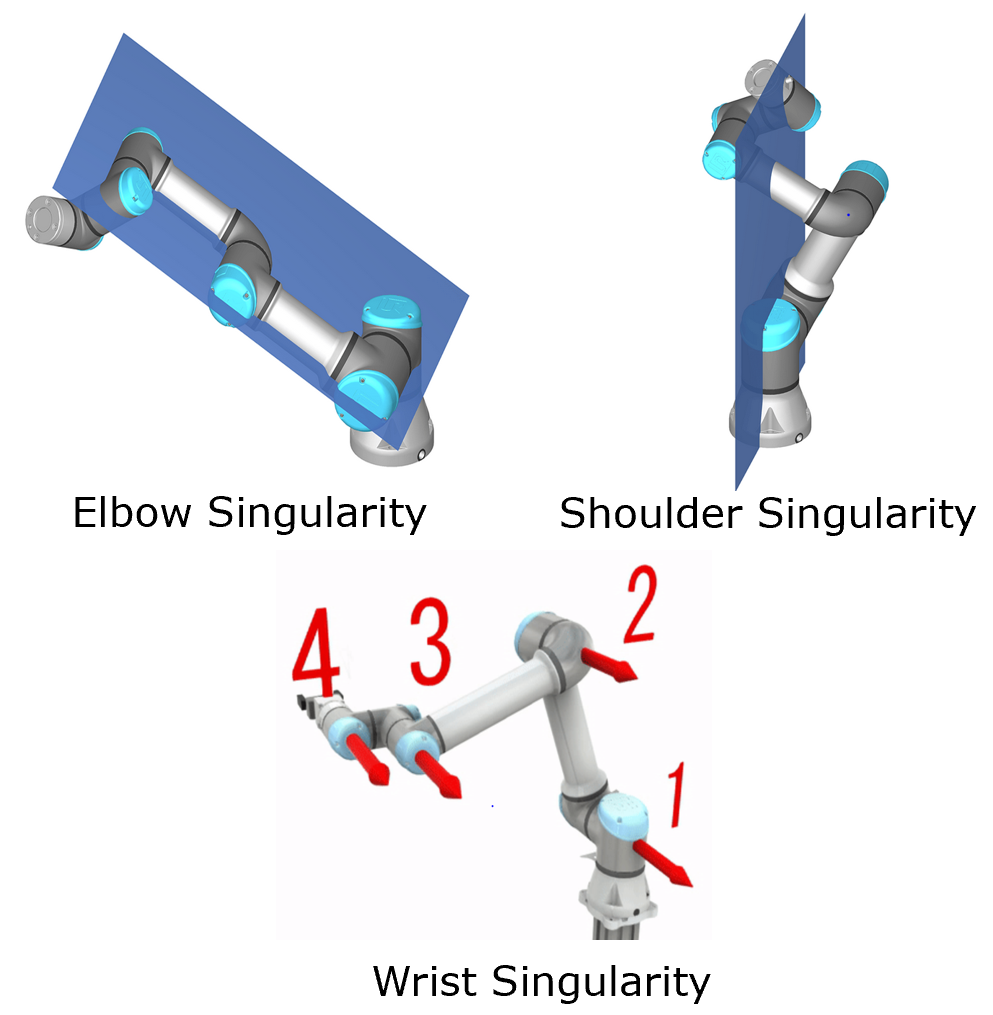
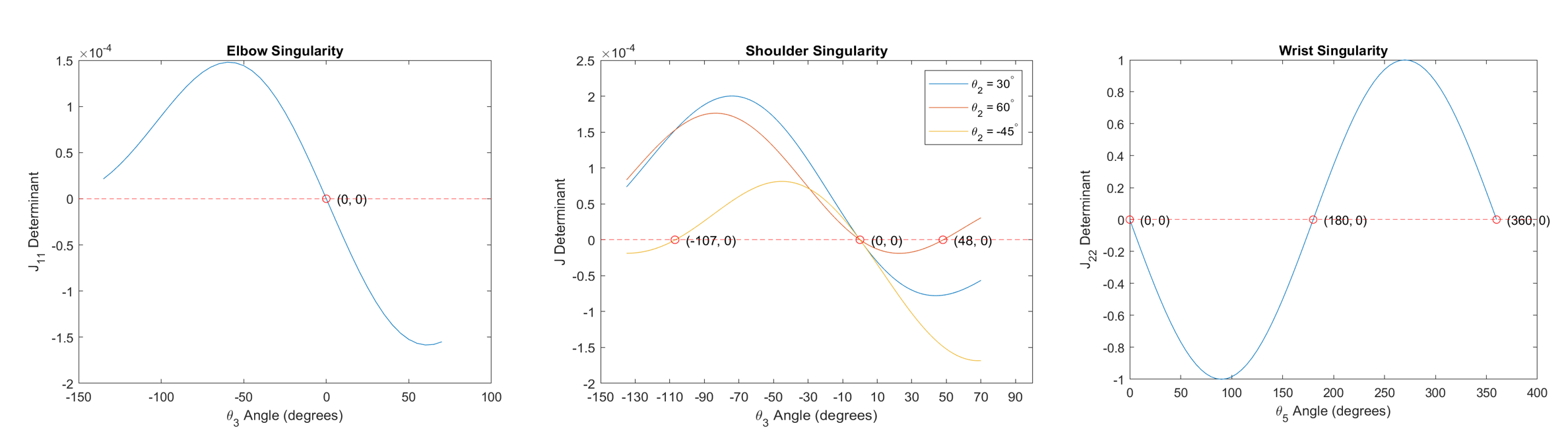
Used MatLab to calculate the Jacobian to determine the poses where singularities occur for the UR5. Ensured that these poses are avoided in the path planning.
Real-life application
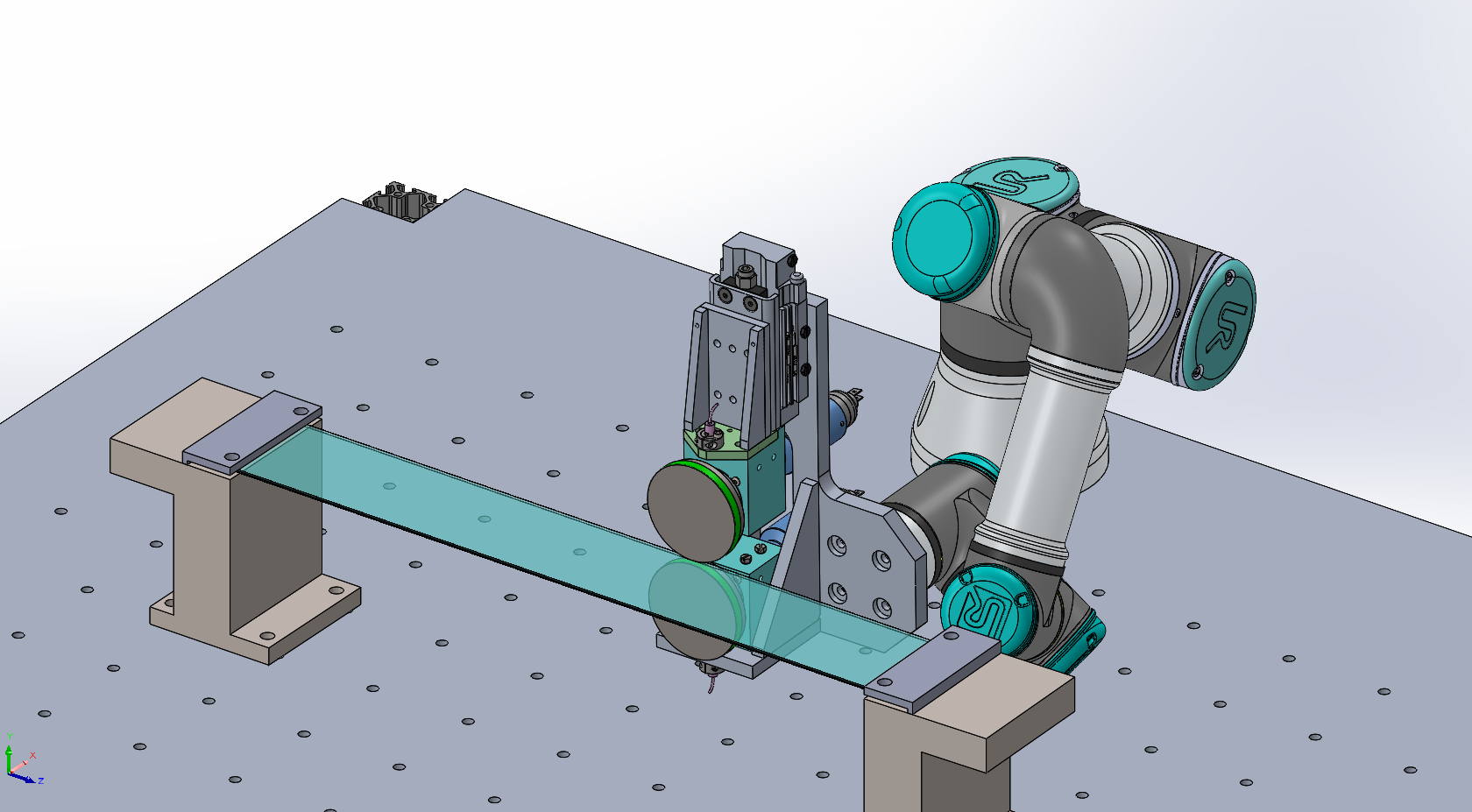
Design fixtures, programming path plan, and IO
CAD designing of end effector
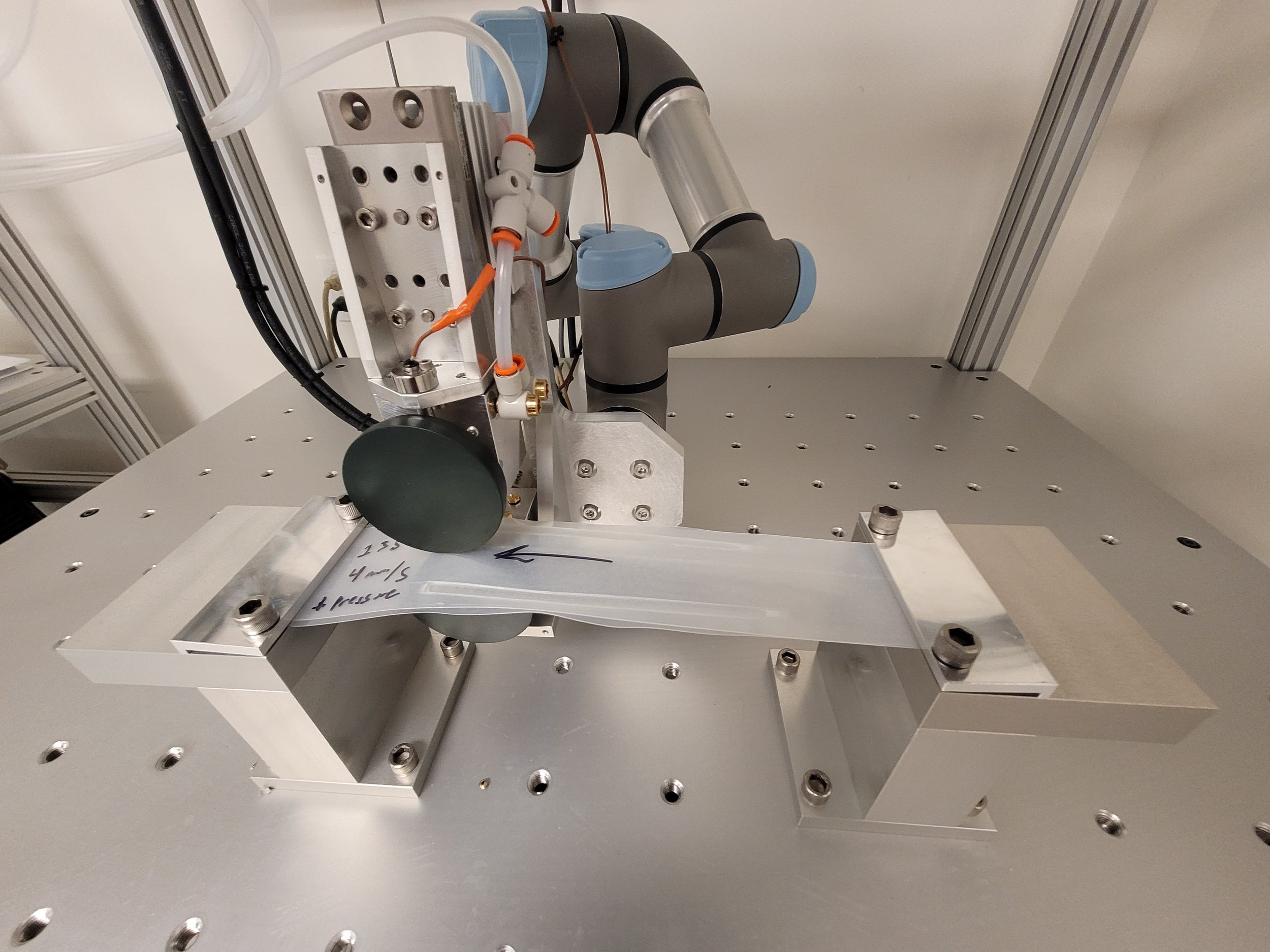
End effector implemented on UR5e. Programmed path plan and IO with thermal heater and pneumatic actuator.